Projects
Learning for Robotic Navigation
At a Glance
Objective
Classify regions in rover imagery according to their ease of traverse. Decrease traverse times, avoid getting stuck.Benefit
Novel system classifies terrain underfoot by feel, records the appearance of that terrain, and then uses this appearance to classify far-field scenes.Approach
Combination of Hidden Markov Model (HMM) unsupervised terrain classifier with advanced Support Vector Machine (SVM) visual classifier The resulting system runs in real time on the robot.Accomplishments
The technology was developed during the DARPA LAGR (Learning Applied to Ground Robotics) program, the little brother to the DARPA Grand Challenge.The full system was among the three top finishers in highly competitve field tests done by DARPA management.
It is now being extended and tested in work sponsored by the Army Research Office (ARO).
Details
Proprioceptive Classification
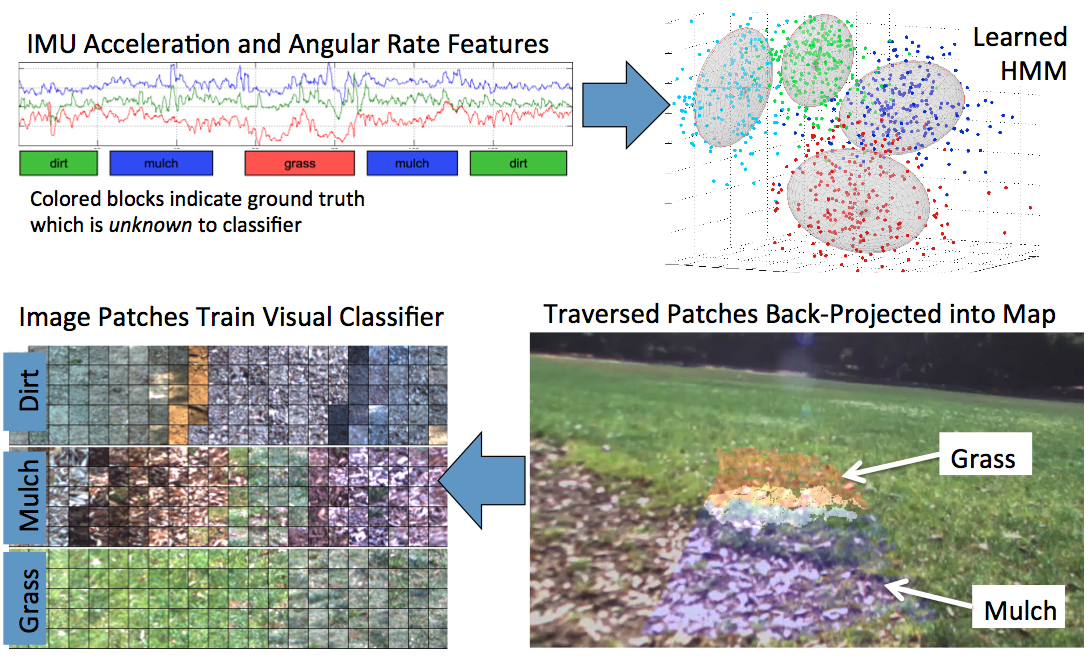
Our approach to proprioceptive classification uses extensive logs of high-rate IMU (~100 Hz), slip, and motor current data, collected over diverse terrain types, to provide information for an unsupervised terrain classifier. The unsupervised classifier uses a hidden Markov model (HMM), determined with advanced optimization techniques, to exploit temporal coherence of terrain classes as the vehicle moves. We obtain the number of distinct classes automatically by computing the stability of the clustering solution: the number of classes is increased up to the point where the number of local maxima in the fitness landscape (HMM log-likelihood) grows too large to obtain a stable solution.
Field experiments provide time series to train the HMM. This empirical approach avoids detailed modeling of vehicle/terrain interaction, which can add complexity and cause brittleness when modeling assumptions are violated. Using this approach, we have successfully classified four terrains (grass, mulch, dirt, and asphalt), plus an unknown class for novel terrain, to 90% accuracy, with data collected by a Packbot vehicle over a range of velocities from 0.5-2.0 m/s.
Visual Classification
After a set of classes has been defined and the proprioceptive
classifier has been trained as above, the terrain the vehicle
traversed in the process is labeled by terrain type at a set of
patches along the path. These patches are projected into images and
local maps obtained during the traverse to collect features to train
the near-field classifier, which uses both visual features from the
images and 3-D features from the range data or maps. The image above
illustrates the sequence from acquiring proprioceptive data, through
HMM-based learning, to projecting patches into prior images to
collect visual features for training the near-field classifier;
collecting features from the local maps is analogous.
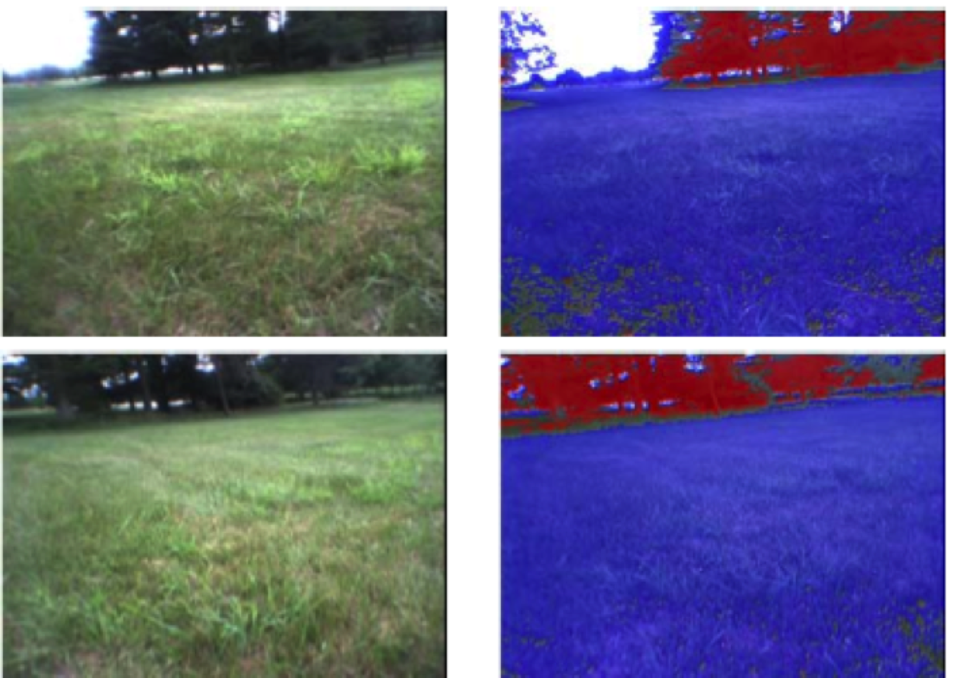
The visual classifier must run in real-time. In prior work with
the DARPA LAGR project, we developed a fast Support Vector Machine
(SVM) classifier using various feature sets that ran at 35 Hz with
640x480 color imagery. The most successful feature set was bivariate
normalized-color (e.g., the a* and b* channels from CIELAB) histograms,
which contain 256 features, with accuracies ranging from 90-96%
depending on field conditions. We found that patch-average normalized
color plus a handful of Gabor textures performed approximately as
well. The visual classifier begins operation with a default parameter
set, but is then trained for existing visual conditions as the robot
drives. In general, we have found that on-line adaptation in the
visual classifier is beneficial in developing a robust system, and
on-the-fly SVM training is a strength of our system. We have also
developed a random fern-based classifier, which can provide increased
speed at the cost of marginal loss in classification accuracy.
Selected Publications
Rankin, A., Bajracharya, M., Huertas, A., Howard, A., Moghaddam, B. and others (2010). “Stereo-vision-based perception capabilities developed during the Robotics Collaborative Technology Alliances program,” SPIE Conference Series, vol. 7692, pp. 76920C-76920C-15. Document.
Bajracharya, Max, Howard, Andrew, Matthies, Larry, Tang, Benyang, and Turmon, Michael (2009). “Autonomous off-road navigation with end-to-end learning for the LAGR program,” Journal of Field Robotics, 26(1), pp. 3–25, Wiley. Document (CL#08-3542).
Bajracharya, Max, Tang, Benyang, Howard, Andrew, Turmon, Michael, and Matthies, Larry (2008). “Learning long-range terrain classification for autonomous navigation,” 2008 IEEE International Conference on Robotics and Automation, pp. 4018–4024. Document (CL#08-0301 (NTR 45146)).
A. Howard, M. Turmon, L. Matthies, B. Tang, A. Angelova, and E. Mjolsness (2006). “Towards learned traversability for robot navigation: From underfoot to the far field,” Journal of Field Robotics, 23(11/12), pp. 1005-1017. Document (link to DOI) (CL#06-3711).